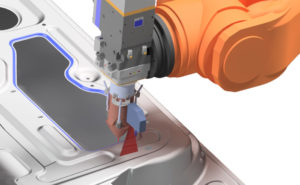
Robots can move – but not see – in all directions. The patented laser sensor SensePRO developed by the Fraunhofer Research Institution for Additive Manufacturing Technologies IAPT provides a solution to this problem. Where am I? Like humans, robots also need to answer that question, while they tirelessly glue, weld or apply seals to workpieces.…
UT Austin Patent Gives Robots Ultra-Sensitive Skin
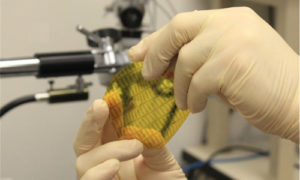
The University of Texas at Arlington has patented a smart skin, created by a UTA researcher, that will give robots more sensitive tactile feeling than humans. “The idea is to have robots work better alongside people,” said Zeynep Çelik-Butler, a UTA electrical engineering professor. “The smart skin is actually made up of millions of flexible…
John Lizzi, Executive Leader, Robotics at GE to deliver keynote at Robotics Summit & Showcase

Leader of GE’s Global Robotics Initiatives To Emphasize Transformational Innovation at Event for Robotics and Intelligent Systems Technical Professionals Cleveland and Boston – 4/19/2018– Business-to-Business publisher WTWH Media, LLC announced John Lizzi, Executive Leader, Robotics, at GE will deliver a keynote address at the inaugural Robotics Summit & Showcase. The Robotics Summit s an international…
Robotics Summit Early Bird Registration ends April 20th
Early Bird Registration for the Robotics Summit and Showcase ends on April 20th, 2018. Register by April 20th and receive a 20% discount to attend the event. The International Technical Design and Development Conference for Robotics and Intelligent Systems May 23-24, 2018 – Boston MA Agenda | Keynotes | Speakers | Sponsors | Register…
Mind-controlled robots read your mind to correct errors
Massachusetts Institute of Technology’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and Boston University have developed a system that allows humans to direct and correct robots using only their brains. The system uses an electroencephalography (EEG) monitor to record brain activity that the system can detect when the user notices that there was an error…
Heart failure devices: This amazing new robot could be the future
A new customizable robotic heart sleeve has demonstrated potential when it comes to aiding the beating of a failing heart, according to the Harvard University and Boston Children’s Hospital researchers who developed it. The researchers claim that the soft robot has advantages over the heart assist devices such as VADs that are out there because…
Singular Impressions from IROS 2013 in Tokyo

Two images remain in my mind from IROS 2013 last week in Tokyo. The respect for Professor Emeritus Mori and his charting of the uncanny valley in relation to robotics, and the need for a Watson-type synthesis of all the robotics-related scientific papers produced every year. Let me explain. Uncanny Valley: Almost all of the presentations at…
Robots on TV
Verizon and GE have produced television advertisements that include robots. The ads are playing frequently and nationally. They are good, they’re being talked about and tweeted, audiences like them, and they are great promotional pieces for the robotics industry. The ads are indicative of PR and advertising agencies’ growing awareness that people are becoming at…
Robocar Used For Research On Self-Propeltion Algorithms

Diginfo is developing a car robotics platform combining robots and cars. It’s thought that the next generation of vehicles that have intelligent capabilities will have several things in common with self-propelled robots. Robocar is 1/10 scale platform constructed for research in this new field of car robotics. Kazuhiro Ishikawa in the Technology Development Department of […]
Optical Sensor Gives Robots Human Touch
In recent years, lots of efforts have been made to give robots the ability to hear and see. But what about the sense of touch? Unlike us, robots don’t have sensitive skin. But this is about to change. By using organic, or plastic, field-effect transistors as pressure sensors deposited on a flexible material, researchers at […]
Robotic Fish Helps Understand Changes In Open Waters
The above video shows an interesting new type of fish—one with a mission. Despite its impressive life-like movements, it is actually a robot prototype that has been developed by scientists and researchers at the University of Essex, England. It is still being perfected at the London Aquarium, with a number of the expensive fish (each […]
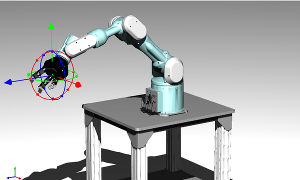
Robots and Actuators
A couple of important nuances of the robotics field came to my attention recently. The relationship of the actuators themselves to the robot design, and of course, the kinematic framework of the robot itself. I have some history in both areas but am regularly surprised by the way innovation continues to take place. Despite the […]
RE2 Inc. to Develop DMS for U.S. Navy
PITTSBURGH, PA – RE2, Inc. announced today that it has been competitively awarded a Phase II Small Business Innovation Research (SBIR) program by the U.S. Navy to develop a Dexterous Manipulation System (DMS) for mobile robots and explosive ordnance disposal (EOD) robotic platforms.
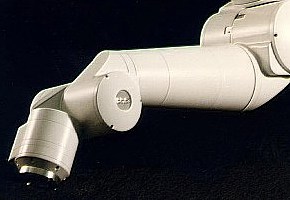
More Mechatronic and Robotic Reflections
The blend of sensors and motion control become crucial in many applications. The dextrous robot hand of recent years cracks eggs like a chef with the aid of sophisticated pressure sensors at the tips of its “fingers”. Check out the Shadow Robot company for some amazing videos of their “air muscle” powered robot hand in […]