
The roadmap is a first for the country. It gives an overview of the current state of RAS, and outlines sectors with potential for growth.
Webinar: AI / Machine Learning and Cognitive Robotics
Wednesday, May 26, 2021 2 PM ET / 11 AM PT Any Internet search using the terms “artificial intelligence” (AI), “cognition”, or “machine learning”(ML) with the word “robotics” will return a slew of research and commercial initiatives focused on focused on robotic decision making, object identification, vision processing, autonomous navigation, motor control, sensor…
Webinar: Advanced Motion Control Solutions for Healthcare Robotics Applications – March 24

Wednesday, March 24, 2021 2 PM ET / 11AM PT Motion control is what makes robotics systems ‘robotic’, and it is advances in motion control technologies that have spurred a great deal of robotics innovation and a dramatic increase in the use of robotics technologies and products around the globe, including for healthcare applications. But…
Webinar: Collaborative robotics: systems, applications and opportunities
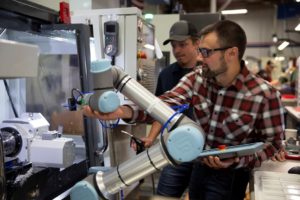
This webinar was presented live on April 23, 2020 Click below to watch on demand The usefulness of traditional industrial robots, noted for performing repetitive tasks with speed, strength, and precision, has been limited by their inability to work directly with humans. The introduction of collaborative robots, robotic systems that can work safely…
Webinar: Robotics Solutions for Warehouse and Distribution Center Operations

This webinar aired live on Wednesday, December 18, 2019. Please click the link below to watch it on demand. Corporate logistics and supply chain groups have adopted a wide range of robotics solutions to improve the operational efficacy and efficiency in warehouses and distribution centers. Robotics solutions, technologies that “sense, think and act”…
Army researchers develop novel technique to locate robots and soldiers in GPS-challenged environments
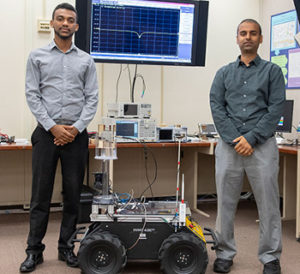
Scientists at the U.S. Army Research Laboratory have developed a novel algorithm that enables localization of humans and robots in areas where GPS is unavailable. According to ARL researchers Gunjan Verma and Dr. Fikadu Dagefu, the Army needs to be able to localize agents operating in physically complex, unknown and infrastructure-poor environments. “This capability is…
SwRI’s Collaborative Robotics Laboratory Much More Than Branding Exercise

With the launch of the Collaborative Robotics Laboratory, the Southwest Research Institute solidifies its position as a leader for R&D and project work for groups adopting ROS and collaborative robots for industrial work. Synopsis On August 14, 2018, the Southwest Research Institute (SwRI), a non-profit applied research and development organization located in San Antonio, Texas,…
UT Austin Patent Gives Robots Ultra-Sensitive Skin
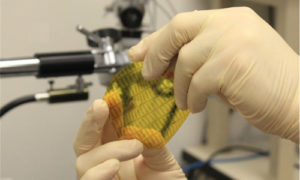
The University of Texas at Arlington has patented a smart skin, created by a UTA researcher, that will give robots more sensitive tactile feeling than humans. “The idea is to have robots work better alongside people,” said Zeynep Çelik-Butler, a UTA electrical engineering professor. “The smart skin is actually made up of millions of flexible…
July 2018 Robotics and Intelligent Systems Investments

Investment into robotics and intelligent systems companies for July 2018 was robust, totaling approximately $1.6B worldwide from 34 investments into the same number of companies. In June 2018, 27 robotics startups raised $2.1 billion. The bulk of the July 2018 investments were made into companies developing software and hardware technologies and products, along with services…
John Lizzi, Executive Leader, Robotics at GE to deliver keynote at Robotics Summit & Showcase

Leader of GE’s Global Robotics Initiatives To Emphasize Transformational Innovation at Event for Robotics and Intelligent Systems Technical Professionals Cleveland and Boston – 4/19/2018– Business-to-Business publisher WTWH Media, LLC announced John Lizzi, Executive Leader, Robotics, at GE will deliver a keynote address at the inaugural Robotics Summit & Showcase. The Robotics Summit s an international…
Robotics Summit Early Bird Registration ends April 20th
Early Bird Registration for the Robotics Summit and Showcase ends on April 20th, 2018. Register by April 20th and receive a 20% discount to attend the event. The International Technical Design and Development Conference for Robotics and Intelligent Systems May 23-24, 2018 – Boston MA Agenda | Keynotes | Speakers | Sponsors | Register…
Meet the Robotics Summit Keynotes

WTWH Media and The Robot Report has announced the keynote lineup for the inaugural Robotics Summit & Showcase taking place May 23-24, 2018 at the Westin Waterfront in Boston, Massachusetts. The Robotics Summit & Showcase focuses the technical issues involved with the design, development, manufacture and delivery of commercial robotics and intelligent systems products and…
Proletarian Robots Getting Cheaper to Exploit

by Frank Tobe, Editor and Publisher, The Robot Report After laughing uncomfortably at the headline from The Moscow Times reporting about the recent Skolkovo Robot Conference, I parsed through the wording and found the intended meaning. But that process: from shock and incongruity, to amusement, through multiple second thoughts and a bit of research, to an…
2nd International Skolkovo Robotics Conference to be held March 1-2 in Moscow
By Susan and Mike McFarlane, RobotGuide Edited by Frank Tobe, The Robot Report Technopark “Skolkovo”, created in 2010, provides innovative companies participating in the project to support the development of technology assets, contributing to their establishment in the Russian and global markets. “Robotics holds a priority place on the Russian Communications and Media Ministry’s list…
Apple, Amazon and now Google: It’s a pretty exciting time for robotics!
By Frank Tobe, Editor and Publisher, The Robot Report There is serious momentum in robotics these days evidenced by recent news from Apple, Amazon and Google: Apple announced that they were investing $10.5 billion in supply chain robots and automation equipment and recently confirmed their acquisition of PrimeSense for $350 million (PrimeSense is the developer…
Singular Impressions from IROS 2013 in Tokyo
Two images remain in my mind from IROS 2013 last week in Tokyo. The respect for Professor Emeritus Mori and his charting of the uncanny valley in relation to robotics, and the need for a Watson-type synthesis of all the robotics-related scientific papers produced every year. Let me explain. Uncanny Valley: Almost all of the presentations at…
Stanford Robot Block Party – part of National Robotics Week
I’m always surprised when I come to Stanford. I find new companies setting up shop in the area. Ford’s new research lab wasn’t there the last time I drove by, for example. Later, when walking around Palo Alto and in a restaurant I could hear snippets of conversation that were different than most other college…
Robots on TV
Verizon and GE have produced television advertisements that include robots. The ads are playing frequently and nationally. They are good, they’re being talked about and tweeted, audiences like them, and they are great promotional pieces for the robotics industry. The ads are indicative of PR and advertising agencies’ growing awareness that people are becoming at…
An Inspiring Conversation with Amir Abo-Shaeer
Amir Abo-Shaeer is a high school physics teacher in Santa Barbara, California. But he is not just any physics teacher. He is the founder and Director of the Dos Pueblos Engineering Academy, is the 2010 recipient of a $500,000 MacArthur Fellow award, and is the lead character in the book The New Cool by Neal Bascomb which tells the…
High Speed and Long Reach 6-Axis Robots from EPSON
EPSON Robots introduces the new EPSON S5-Series 6-Axis Robot Lineup. S5-Series are high speed, mid size 6-axis robots with a small footprint and advanced flexibility for even the most demanding and complex applications. Designed for maximum performance, S5-Series robots feature EPSON’s new SlimLine design for increased flexibility. The enhanced slim body and compact wrist design […]
This time, with feeling
Real-time operating system software helps provide tactile sense to medical robotics applications No matter how many motion axes are involved and regardless of whether the movement is fast or slow, high-end robotics applications share the need for determinism. The system that controls the robot needs to keep precise track of the machine at all times, […]
ABB adds midrange robot for the 12 to 20 kg payload class

ABB Robotics introduced the IRB 2600, the latest model in its medium capacity range of multipurpose robots. This robot is compact but with an ultra-wide working range and a payload capacity up to 20 kg. It also offers the best accuracy and speed in its class, improving productivity through increased output, faster cycle times and […]